
mmmries
Using TMF8821 time-of-flight sensor for navigation
This is part of the toy_robot group. Some of us are playing around with using Nerves to control small robots and specifically this thread will be about trying to use the TMF8821 sensor to detect objects in front of our robot for the purposes of navigation.
I’m planning to build on the excellent work of Powell Kinney who implemented GitHub - pkinney/tmf882x · GitHub
Most Liked
mmmries
It’s working! I have it sampling 10x per second and then I take zones 6,7, 10 and 11 (in the middle) and wire them up to the front 2 RGB LEDs so that they get dim when it senses something close. This will give me a visual indication of what the bot thinks that it sees ahead.

mmmries
Now that I have my sensor talking to nerves, there are two follow-up items I need to address:
- Update the
tmf882xproject to use circuit_gpio v2+ - Mount the sensor in a reliable way to the trilobot
The first project can be all done in software and involves learning fun new things like how to do host-based testing of an I2C interface, but I’ve been programming all week for work. So I’m going to do the obviously wrong thing and start with project 2
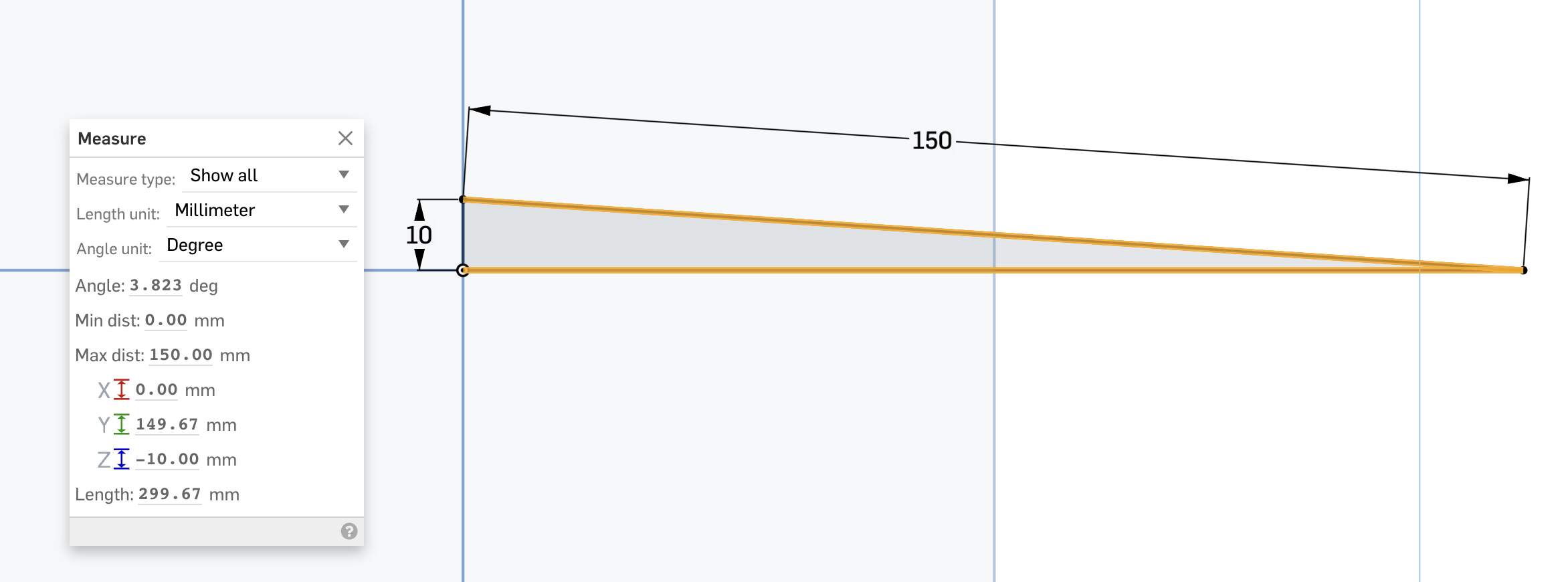
The first thing I noticed is that the Trilobot “leans back a little”, so I put it on a flat surface and measured that the front of the trilobot is about 1cm higher than the back. And since I can’t be bothered to look up the trig I learned back in high school, I just drew a quick sketch in onshape and asked it to measure the angle for me.
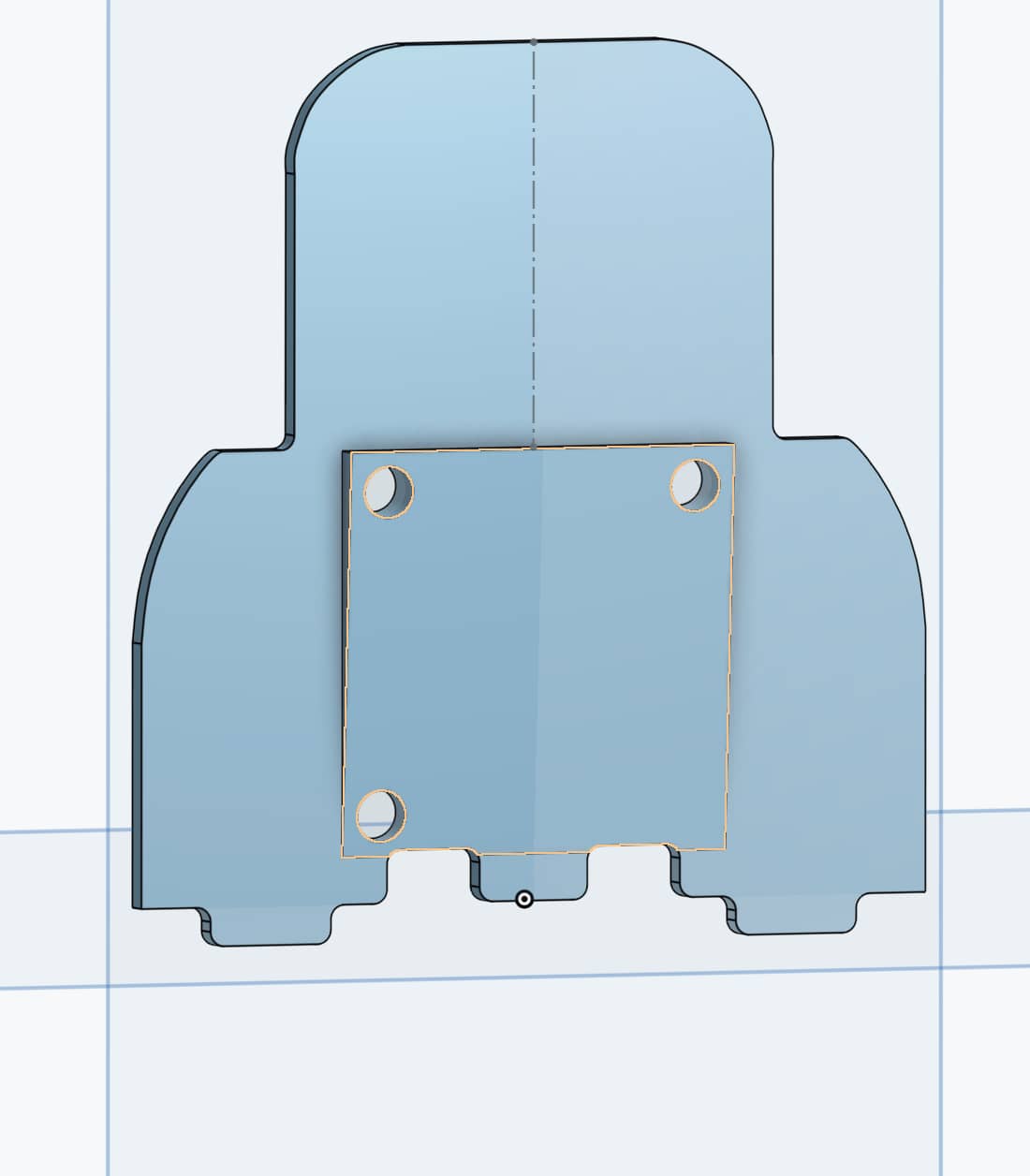
Then I grabbed the cad model I had previously made of the Trilobot and copied out the “front board” part, removed the holes for the ultrasonic sensor, and added a tilted face with this same angle.

Then I sketched in the mounting holes based on the TMF8821 datasheet that shows the location of the 3 mounting holes, and cut out those holes from the model.
Exported this to 3mf, sliced it and sent it to my 3d printer. We’ll see in 30min if it fits ![]()
mmmries
Sparkfun has some helpful resources for this sensor:
The key things to know about this sensor are that it uses a low power laser to sense distance of objects in front of the sensor. It uses some clever techniques to actually measure a grid of distances. There are some tradeoffs between how many measurements there are in the grid and how big the field of view is. I’m planning to use the built-in 3x3 configuration which samples distances 30x per second which should be able to detect both white and dark objects in bright sunlight at a distance of ~750mm.

Popular in Discussions






Other popular topics




 Latest Nerves Threads
Latest Nerves Threads
Latest on Elixir Forum
Sponsor Spotlight

We build reliable cloud platforms for business-critical systems.
Categories:
Sub Categories:
Forums
Popular Tags
- #ecto
- #liveview
- #troubleshooting
- #learning-elixir
- #deployment
- #library
- #erlang
- #testing
- #genserver
- #mix
- #absinthe
- #remote-other
- #otp
- #plug
- #how-to-question
- #macros
- #postgres
- #channels
- #elixirconf
- #exunit
- #discussion
- #code-sync
- #javascript
- #podcasts
- #onsite
- #dialyzer
- #docker
- #authentication
- #umbrella
- #full-time-contract
- #podcasts-by-brainlid
- #ecto-query
- #elixir-ls
- #phoenix_html
- #iex
- #blog-post
- #graphql
- #genstage
- #ai
- #websockets
- #supervisor
- #elixirconf-us
- #advent-of-code
- #distillery
- #processes
- #forms
- #api
- #metaprogramming
- #security
- #hex
Our Sponsors

Build Elixir applications with speed and confidence.

Supporting innovation across the BEAM ecosystem.
We build reliable cloud platforms for business-critical systems.

Catch errors, track performance, monitor hosts and more.

Error tracking for Elixir devs who love to ship. Start your free account.

Producing high quality Elixir screencasts since 2017.

Enabling companies to succeed by building software people love.

The deployment platform built for Elixir: PaaS ease, VPS control.

The team behind Membrane, Popcorn, LiveDebugger. Available for hire.

Courses that'll move you from confusion to "Aha, now I get it!"