TL;DR: multi-node deployment tool can be implement with Supervisor-alike strategies to ensure consistent state across all targets: one4all, one4rest, one4one.
Goals: make it simple and flexible. But simple above all.
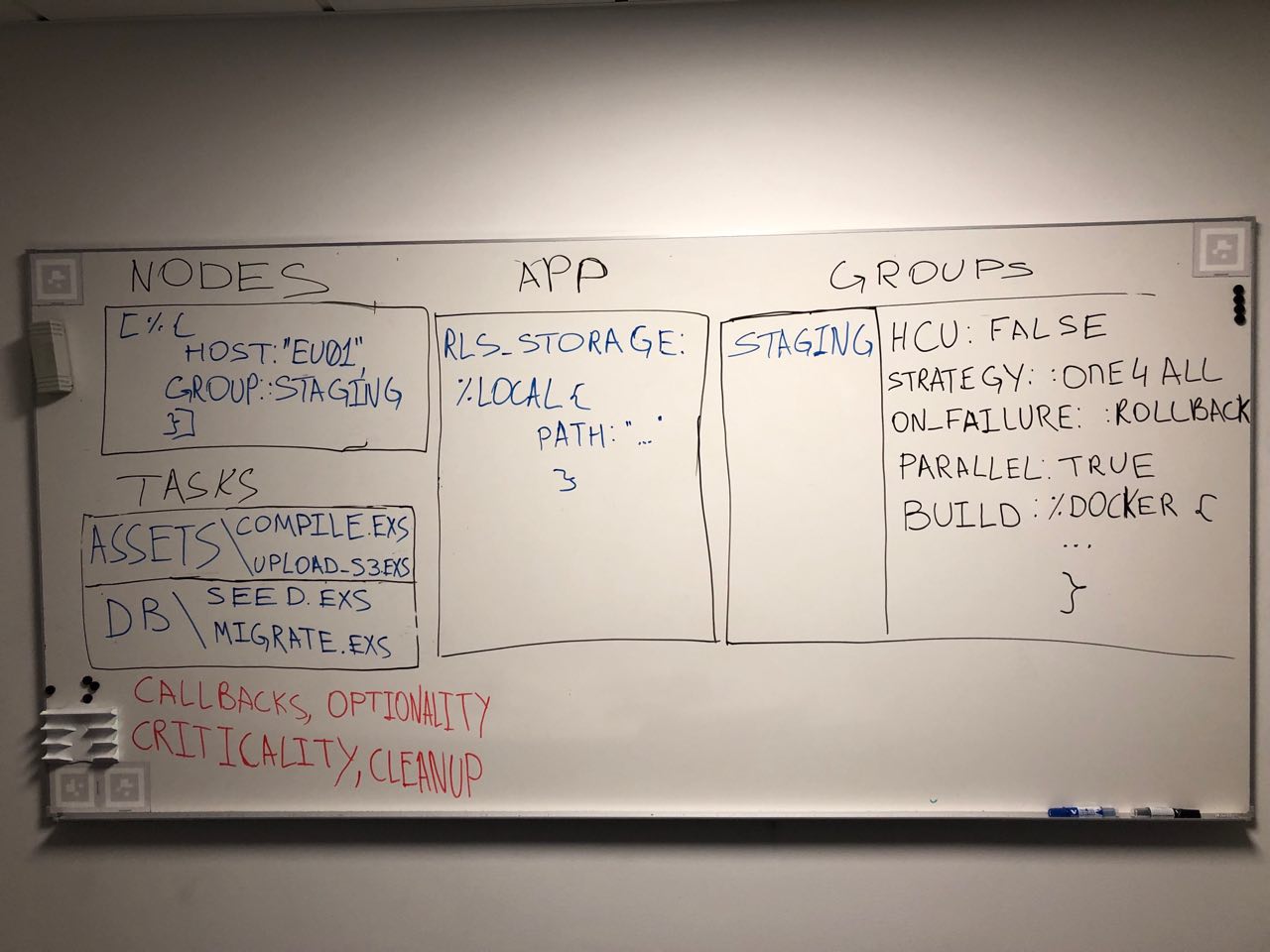
The structure can be following:
Application-wide settings
- Release store.
- Local.
- Remote.
- S3.
Nodes - individual node settings.
- Host.
- Port.
- Environment - free form text labels like
staging,prod, etc.
Environment (Node Group on a picture) - settings applied for a specific environment.
- Full release or hot code upgrade.
- Strategy.
- One4all - fallback action will be applied to all nodes in the group.
- One4rest - fallback action will be applied to all other nodes that were not yet updated.
- One4rest - fallback action will be applied to all other nodes that were not yet updated.
- Name - free form text labels like
staging,prod, etc. - Fallback action - action that will be taken in case node update failed. So far I can think only of
:rollback,:ignoreand:stop. - Build strategy
- Local.
- Remote.
- Docker.
Tasks - deploy and rollback tasks. For some reason right now I’d prefer to use directories as a grouping criteria, meaning having dirs like 10_assets and 20_deploy but that’s up for discussion. There can be also an-app wide setting.
On the other hand tasks can be either order by file names or by dependency graph.
Tasks will be just a set of Elixir modules conforming to a protocol akin to a Plug.
For example they can have:
- “Stage” setting. At very least backwards compatibility with those hooks will be maintained Run additional build tasks · edeliver/edeliver Wiki · GitHub
- “Optional” setting. There should be a mechanism that will allow to execute tasks only in certain situations, say for the initial deployment only. There might be an
optionality_groupsetting that can be passed through the cli. Like combination ofinclude/excludeand tags in ExUnit ExUnit.Case — ExUnit v1.17.1 - “Critical” setting. Will define whether deployment to node should considered to be failed if task failed.
- “Cleanup” callback. Will be run in case of a failed deploy to optionally revert changes.
- “Run” callback. The body of a task

- “Environment” settings. If set - those will apply only for specific environment.
One implied rule is that rollout process across all nodes in a given environment should be uniform - probably it will be impossible to deploy on Linux and OpenBSD within one environment.
Now please tell me if that will cover your particular use-cases ![]()





















